MQTT Connector 2
A NEW URCap plugin for Universal Robots to increase communication capability over the network with the MQTT v3.1 protocol. It now supports multiple brokers, an easy-to-use GUI, TLS client certificate connection, and publishing of robot diagnosis data.
Try the free URSim demo version
What's new
This version brings a whole new approach, which is more user-friendly and brings many benefits to customers:
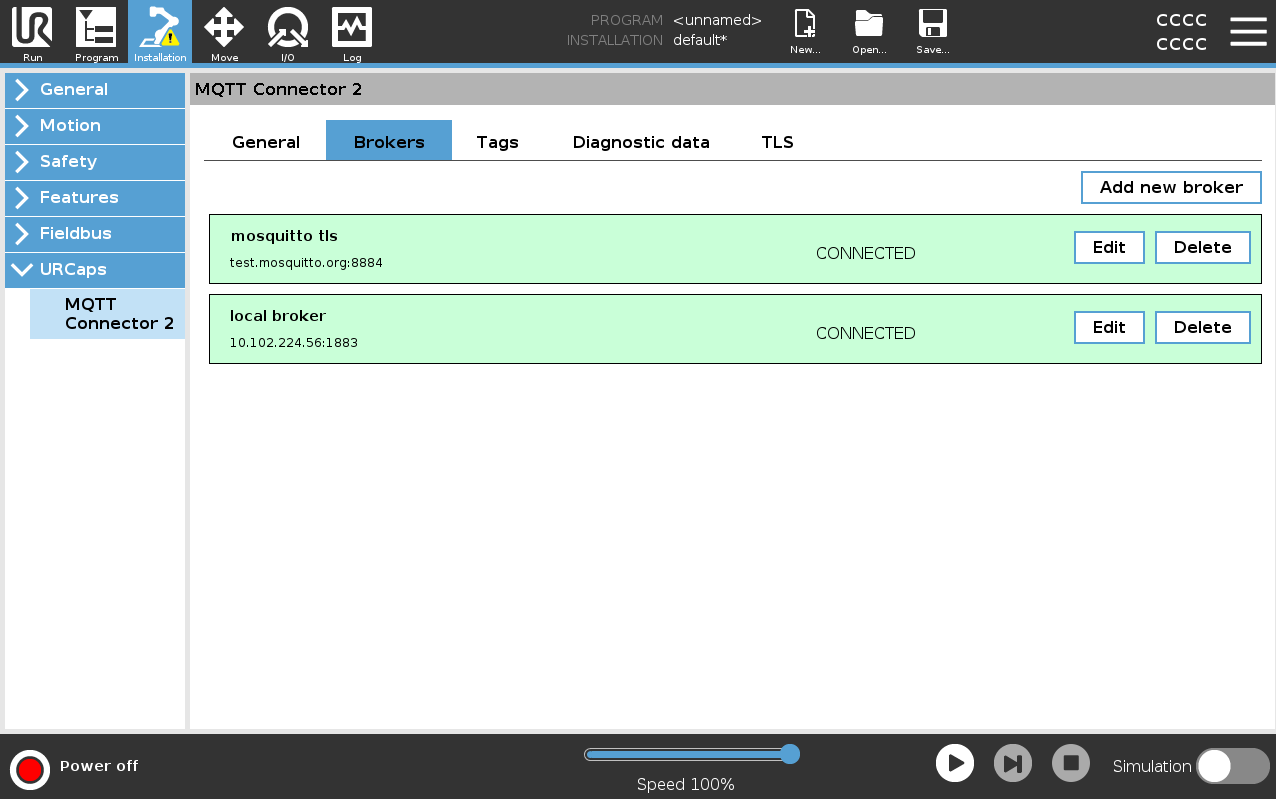
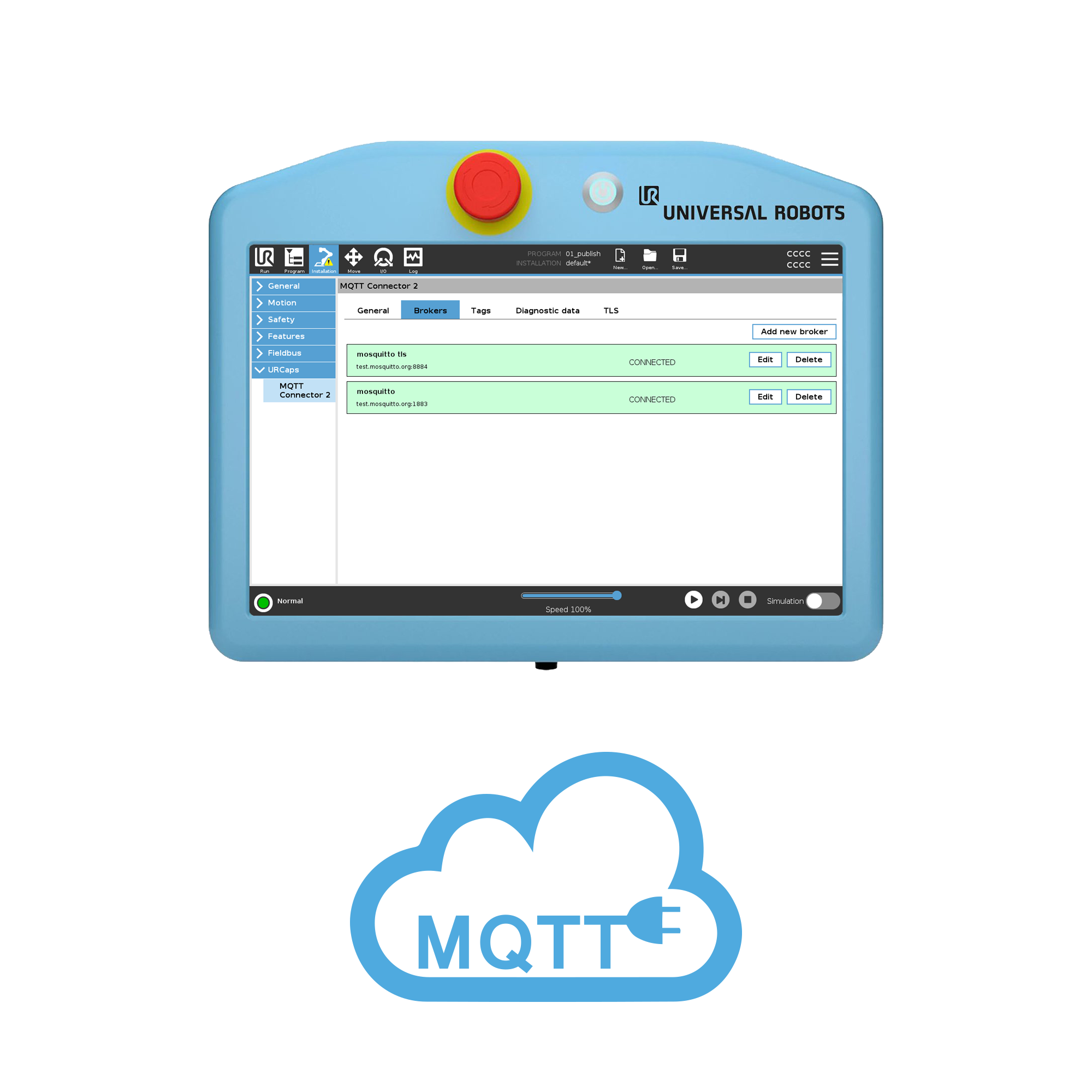
- Multi-broker connection support
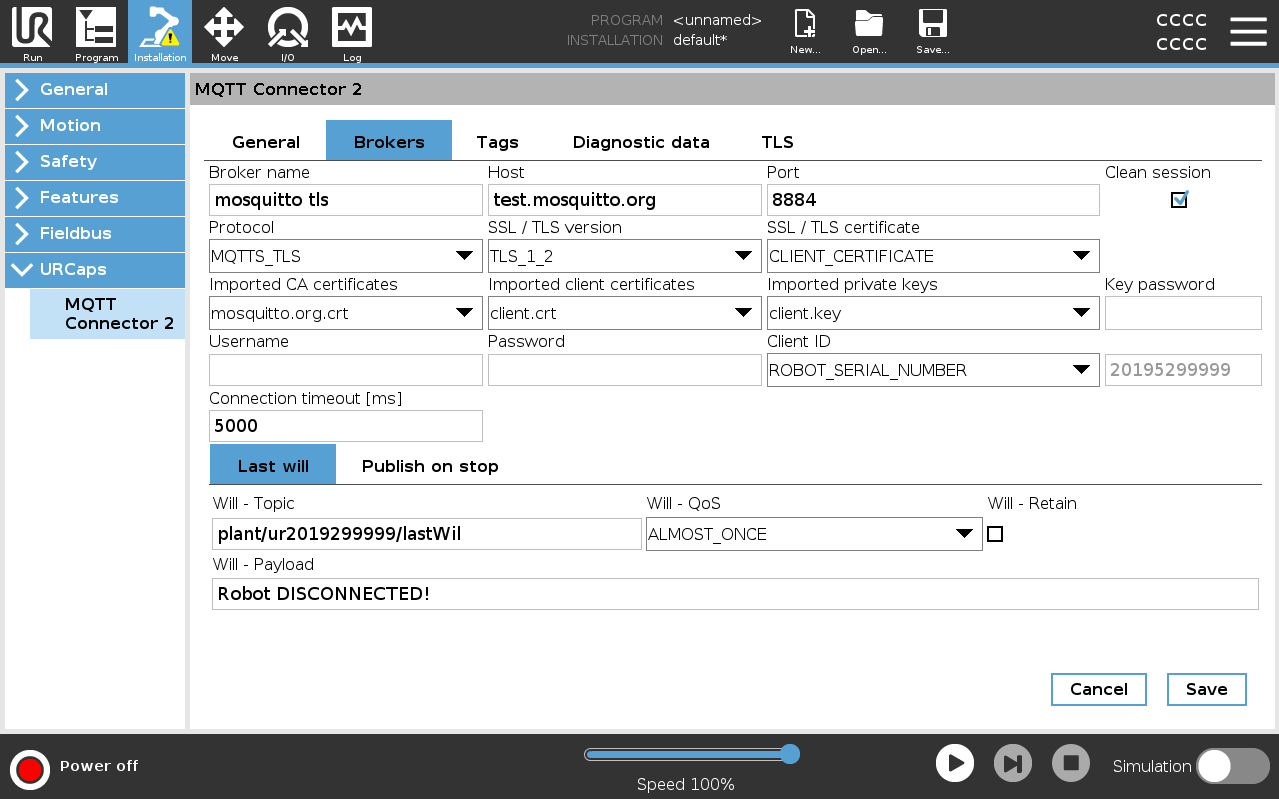
- Wide range of broker configuration parameters
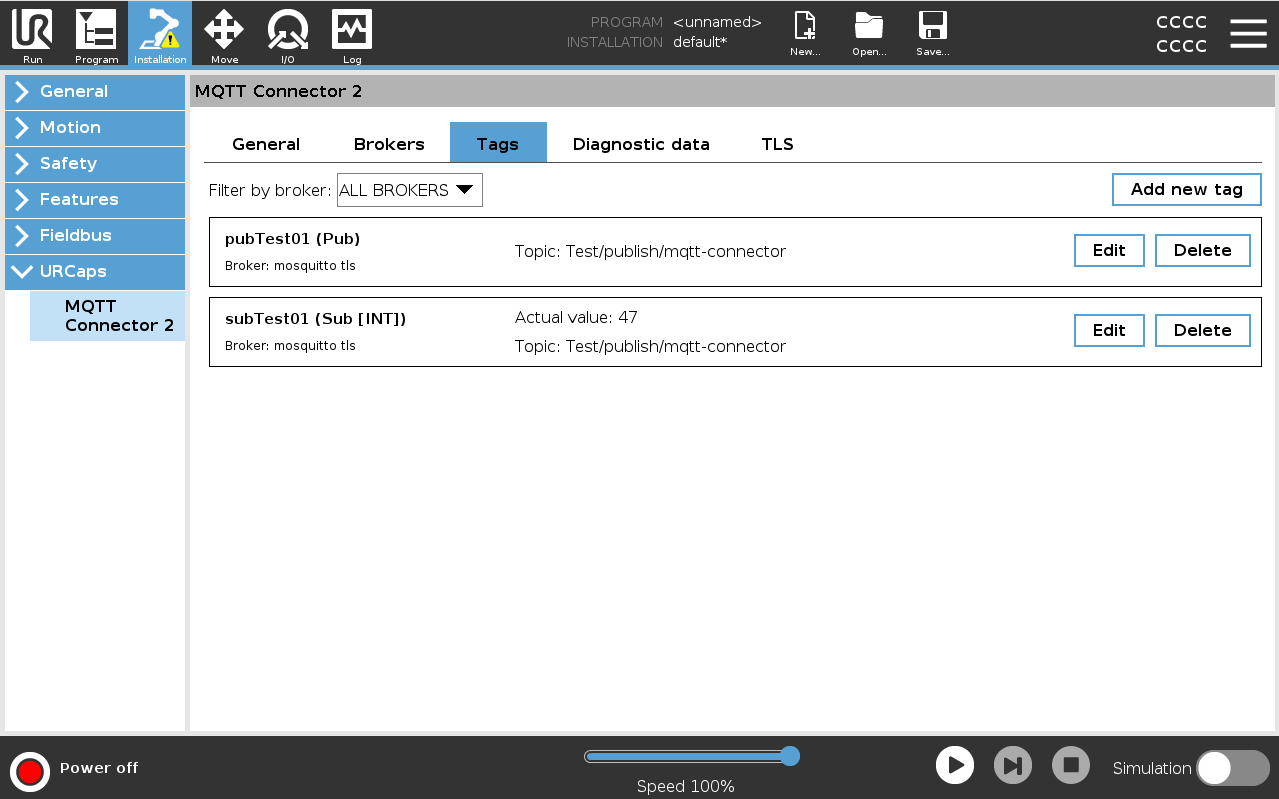
- Topic publishing and subscribing sum up into Tags.
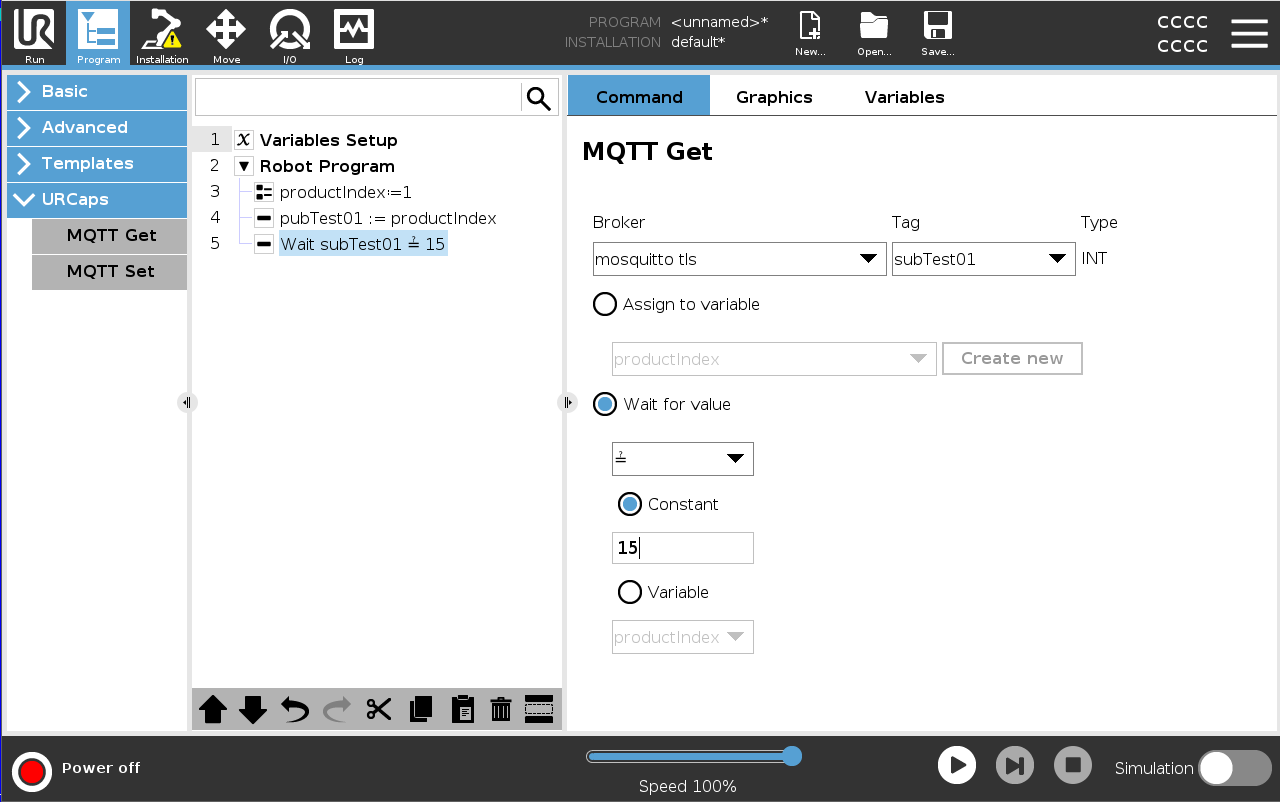
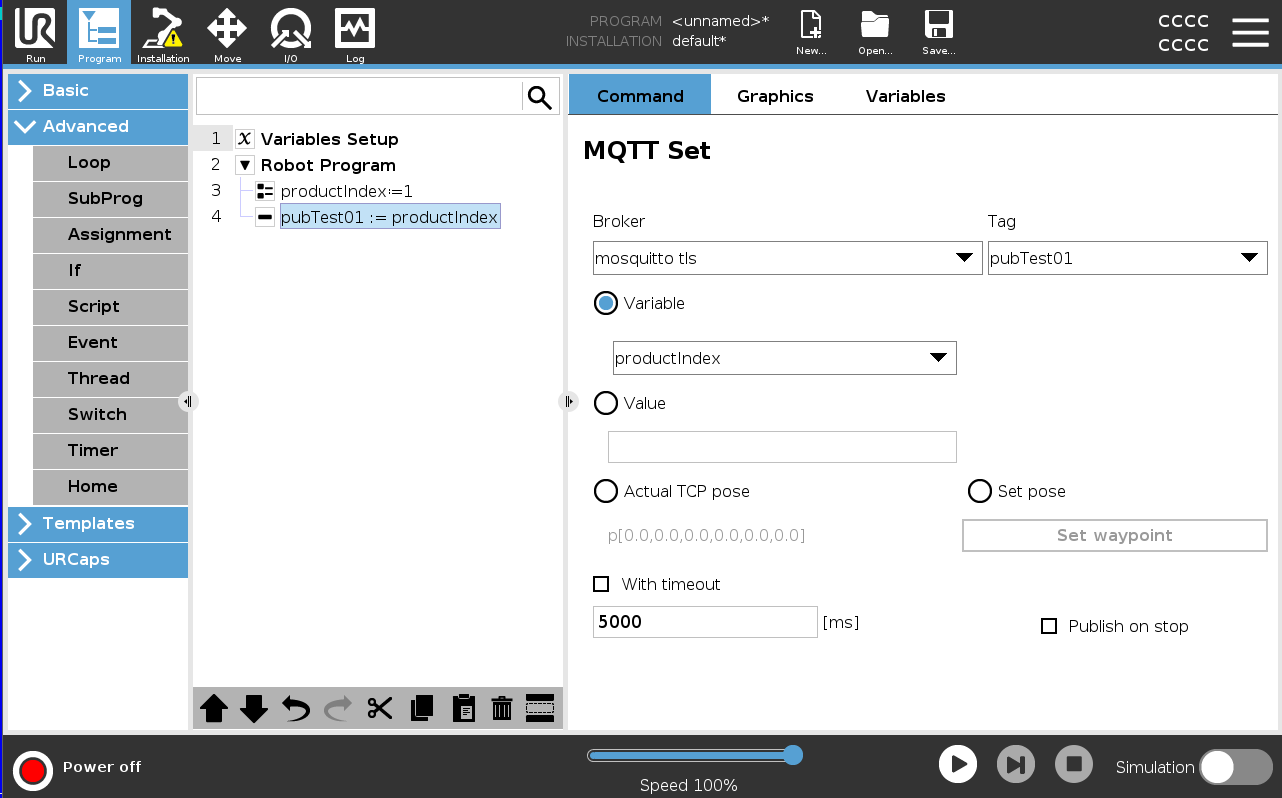
- New program nodes for publishing and getting the subscribed values.
- Support TLS client certificate connection
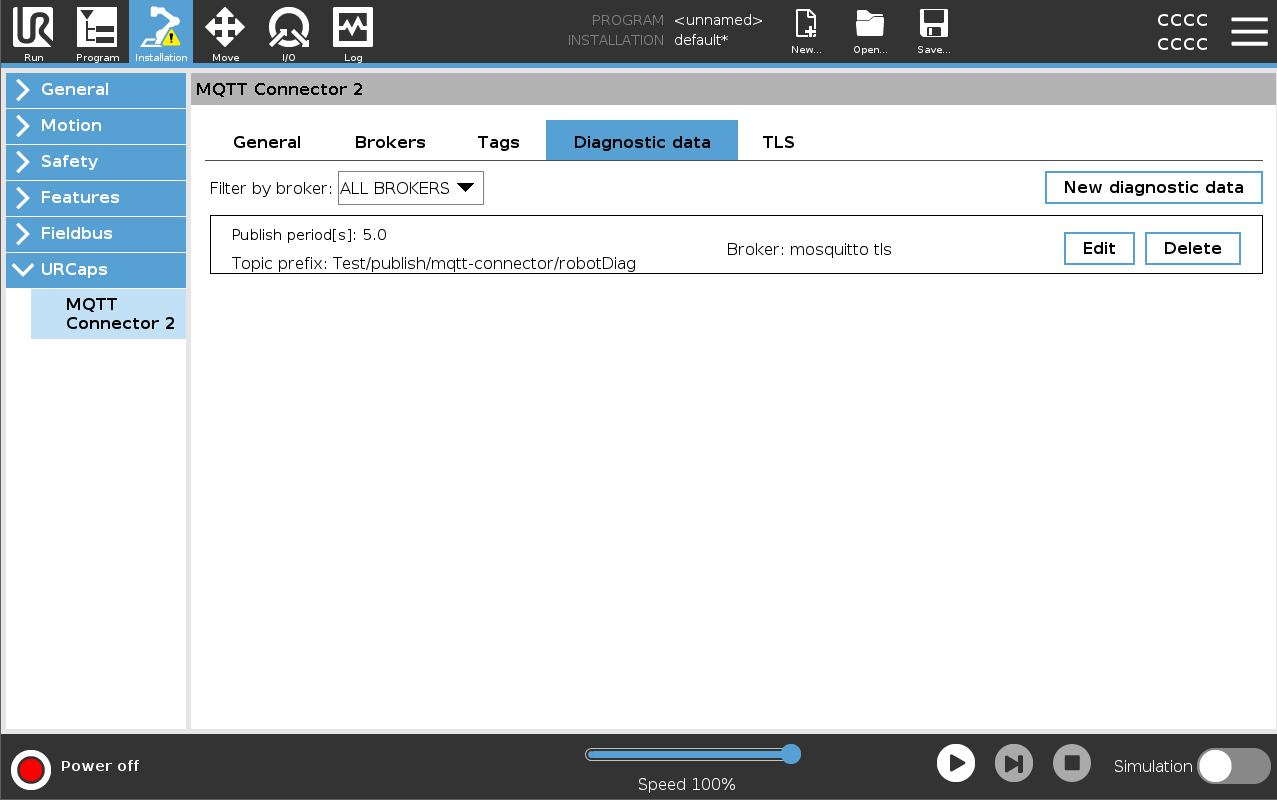
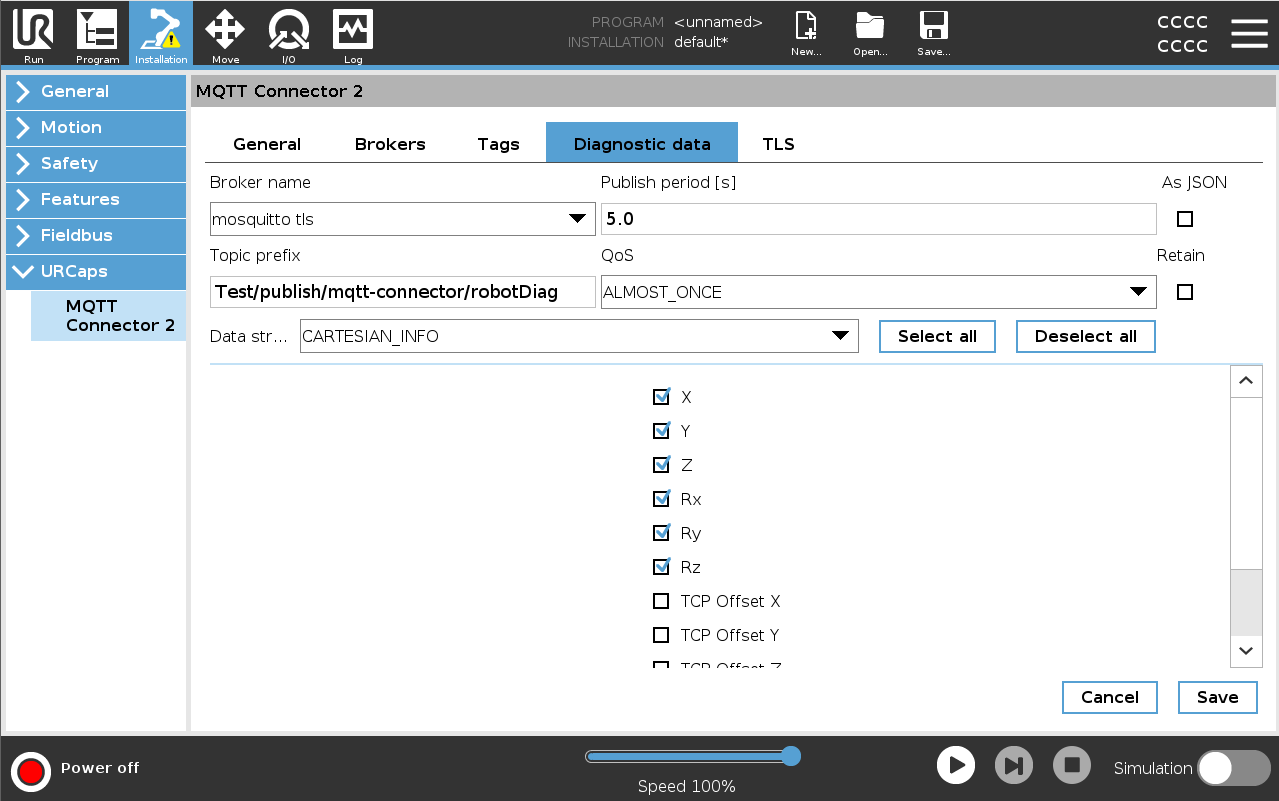
- Publishing of robot diagnostic data.
Examples of user applications
Please find product attachments with examples of URScript using the MQTT connector and application notes. These resources really makes the first use of the product very easy.
Compatibility
| Product version | Polyscope version |
| 2.0.0 | 3.15.7 and 5.25 |
Videos
Installation of the UR simulator
Installation of the MQTT Connector 2
Downloads
| Title | Version | Size | |
| User manual | 2.0.0 | 721,35 kB |
| Title | Version | Size | |
| MQTTConnector2 URCap for URSim | 2.0.0 | 5,97 MB | urcap |
| Example 01 - How to connect a broker using an installation or script. | 1.0 | 7,29 kB | zip |
| Example 02 - How to publish data using MQTT Set program node | 1.0 | 8,58 kB | zip |
| Example 03 - How to get subsribed values using the MQTT Get program node. | 1.0 | 9,68 kB | zip |
| Example 04 - Publish data to the broker defined in the installation GUI using the overrided script method. | 1.0 | 9,53 kB | zip |
| Example 05 - How to publish user data in JSON format using the override script method. | 1.0 | 8,74 kB | zip |
Additional images